ロボットは電池で動きます。7つのサーボモータ、最大4つの MCUを動作させるため省電力制御を考慮した回路構成としています。
◀ この記事の前に: 複数のMCUをつなぐ
▶ この記事の次に:
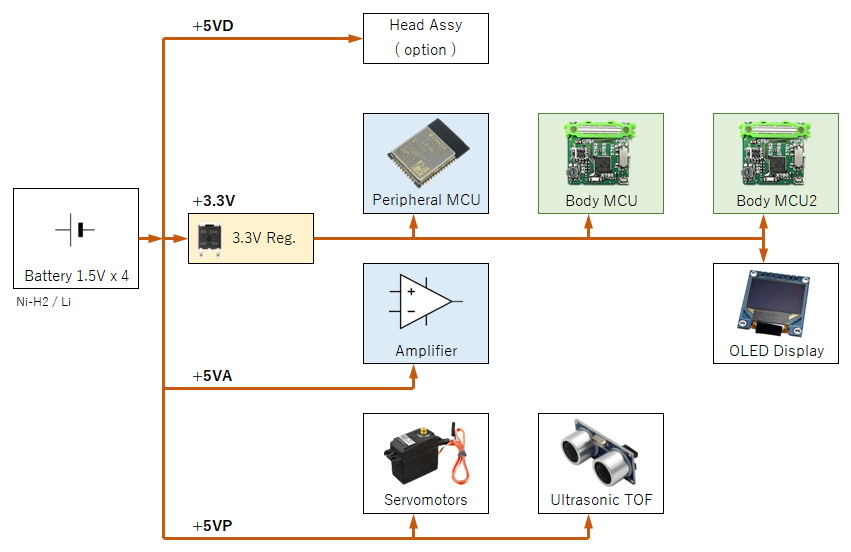
各部に必要な電源
ボード内で必要な電源は以下のとおりです。
- +3.3V: Body MCU や Peripheral MCUはじめ回路の主電源( 安定していることが必要 )
- +5VP: サーボモータを動かすための 5V電源( 大きな電流が断続的に流れる。 )
- +5VA: 発音発声用のアンプの 5V電源( 雑音(ノイズ)を混ぜないようにしたい。 )
- +5VD: 頭部ボード(オプション)用の 5V電源( 頭部ボード内で 3.3Vに降圧します。)
Technical Considerations 電源回路の注意点
本体ボードなどの電子回路や、サーボモータなどの周辺デバイスに十分な電力を供給することとおもに、それぞれの回路やデバイスが求める品質(特性)の電力が必要です。アンプなどのアナログ回路ではノイズの少ないこと、サーボモータでは断続する大きな電流に対応できること、MCU回路は安定していることが必要です。
これらを実現するために、それぞれの系統を分けます。また、アースは電源(電池)に近いところ1点でアース( Gnd)を接続します。プリント基板の配線は抵抗があります。プリント基板のパターン(配線)は抵抗なので、電流が多く流れる系統ではそこで電圧降下が発生します。そこにノイズに影響を受けやすい系統が共用していると、電流が多く流れる系統の電圧変動がそのままノイズに影響を受けやすい系統の電源電圧変動につながります。そこがノイズ源のひとつとなります。それを避けるため系統別にパターンを分けること、電源(電池)に近いところで1点でのアースが望まれます。
回路図には隠れている抵抗成分ですが、プリント基板のパターンを設計(アートワーク設計)するときに注意が必要です。回路図で電源系統を分ける、各系統を電源部で結線するなどの描画が望まれます。
電源(電池)
ロボットの電源は電池です。使用できる電池は以下のとおりです。
- 種 類: ニッケル・水素蓄電池( Ni-MH電池 )
- 形 状: 単三形
- 推奨容量: 2,000mAh 以上
- 使用本数: 4本
- 接続方法: 直列

乾電池は使用できません。モータを使用した製品は急激な電流が流れることがあります。そこに対応できることが必要です。乾電池では急速な電流に対応できないため使用できません。製品としてはパナソニック株式会社の「エネループ(単三形)」などがあります。
ニッケル・水素蓄電池に関してはこちらをご覧ください。
ニッケル・水素蓄電池の特性は以下のとおりです。
- 公称電圧: 1.2V
- 最大放電電流: 2 ~ 4A( 容量が 2,000mAhの場合 )
電圧による電池の状態
- 1.4V ~ 1.45V: フル充電状態
- 1.2V: 通常の放電状態
- 1.0V以下: 再充電が必要
- 0.8V以下: 過放電状態
放電電流は 1C ~ 2C( 容量の1倍 ~ 2倍 )であるため、容量が 2,000mAhの場合で 2 ~ 4Aになります。通常の放電状態(試用中)は電圧が 1.2Vでこの電圧では容量は 50%以上残っています。0.9V以下になると過放電のリスクがあります。電圧測定は放電中に行うと正確な状態で測定できます。電池を放置した場合電圧が回復することがあるため、負荷をかけた状態で測定することが望ましいです。
電源スイッチ
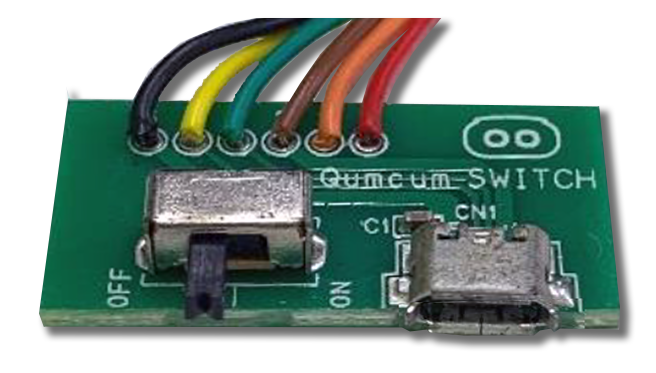
電源スイッチと USBコネクタはロボットのシリーズ( Qumcum )と同じボードを使用しています。
本ロボットでは USBコネクタはデバッグ時の電源供給用のみに使用しています。( データ線は接続していません。)
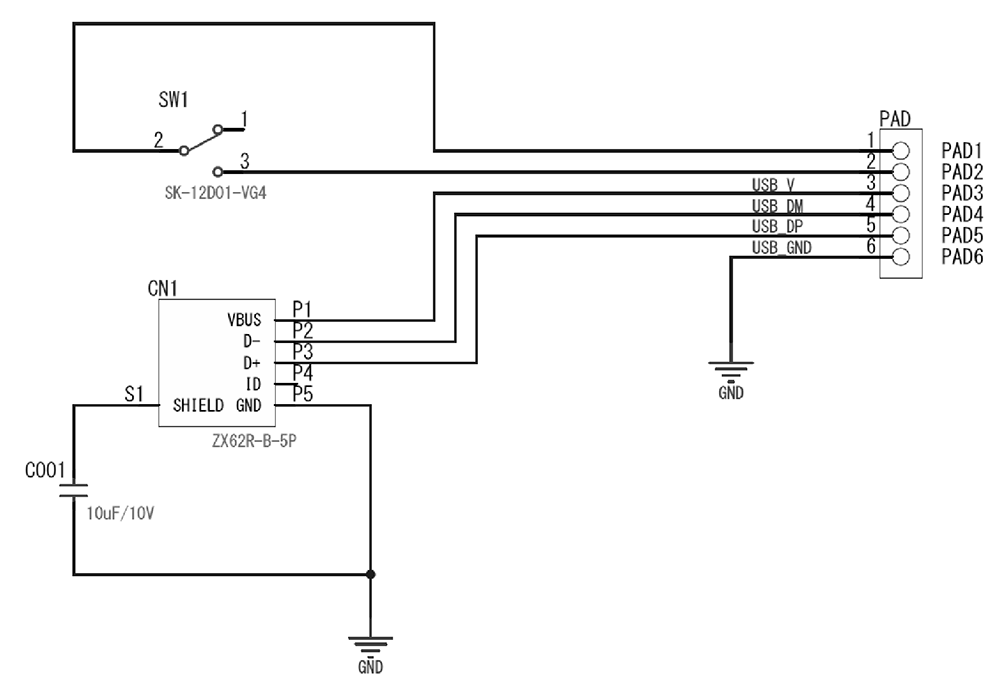

USBケーブルをロボットに接続する時は必ずスイッチボードの電源スイッチが OFFになっていることを確認してください。PCに接続された USBケーブルをロボットに接続するとロボットのメインボードに電源が入ります。ロボットのメインボードにプログラムが書き込まれている場合、プログラムが起動して動作を始めます。( 不意な動作にご注意ください。 )
電源回路
電源部の回路は以下のとおりです。
電源ボードとスイッチボード周辺
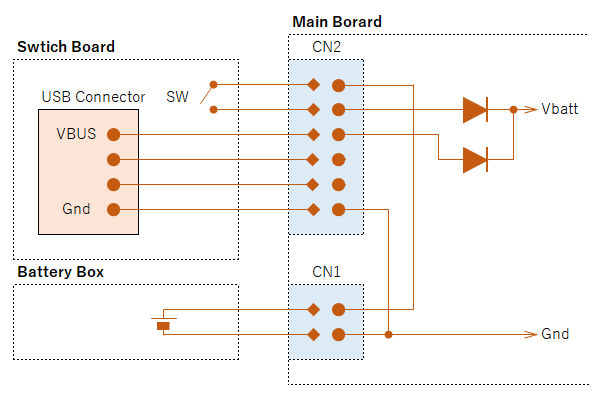
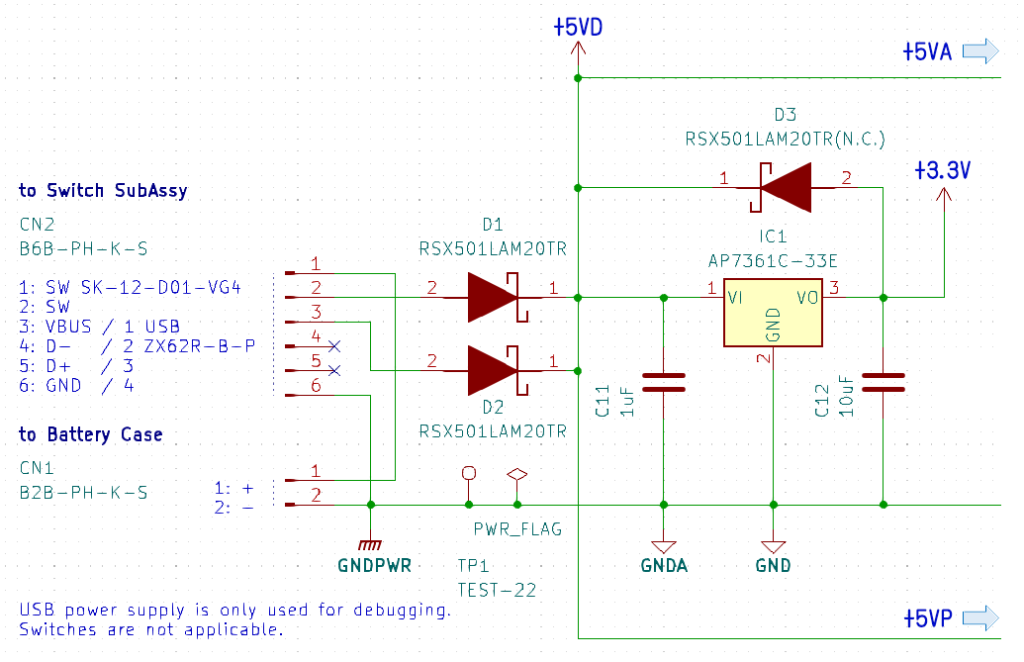
電池とデバッグ時の USBからの電源の入力部分です。電池からの電源はバッテリボックスから、USBからの電源はスイッチボードからメインボードのコネクタを介して入力します。
電池の逆挿入による逆電圧の防止と、電源系統が干渉しないようにダイオードが入っています。このダイオードは電源回路に直列に入っていますので、ダイオードの順方向電圧(Vf)がそのまま大元の電圧から差し引かれることになります。そのため、整流時の消費電力が少なく、発熱を抑えることができる低 Vfのショットキーバリアダイオードを使用しています。
さらに Vfを低減したい場合は理想ダイオードを採用することになりますが、ここではショットキーバリアダイオードを採用しました。
図の SWが電源スイッチです。電池回路に入っています。USB回路は電源スイッチが入っていません。デバッグ時にUSB電源を使用する場合は、USBケーブル途上にスイッチを追加することで対応できます。簡易型ですが電圧・電流を測定できる機能付きのものもあります。デバッグ中は不用意な過電流が流れてボードや部品を損傷することもありますので、電圧・電流測定機能付きのスイッチを USBケーブル途上に入れておくと、大雑把ですが状況が分かります。
例: USB簡易電圧・電流チェッカー / 株式会社秋月電子通商
+3.3V 電源
MCUなどの主電源は +3.3Vです。ロボットでは汎用的なLDO 三端子レギュレータ AP7361C-33Eを使用しています。
LDO( Low Dropout )は低い入出力間電位差でも動作するリニアレギュレータで、低損失型リニアレギュレータや低飽和型リニアレギュレータとも呼ばれます。
概要仕様を示します。
詳細は以下をご覧ください。
AP7361C-33E:Diodes Incorporated / Datasheet
AP7361C-33Eの概要仕様
- 入力電圧: 2.2V ~ 6.0V( 最大 6.5V )
- 出力電流: 最大 1.5A( 電流制限値 )
- ドロップアウト電圧: 360mV( 1A時 )
- 温度シャットダウン保護機能
- フォールドバック短絡保護
- 静止電流: 60uA
+5V パワー系
サーボモータの駆動に必要な電力を供給します。電源(電池など)から逆流防止用のダイオードを介して直接サーボモータに電力を供給します。省電力制御の対象となります。
ここには大きな電流が断続して流れることがありますので、ボード内の電源に近い箇所で接続しています。
+5V アナログ系
発音発声用のアンプに必要な電力を供給します。電源(電池など)から逆流防止用のダイオードを介して直接、増幅回路に電力を供給します。省電力制御の対象となります。
ここのノイズは直接アンプの雑音に影響するため、ボード内の電源に近い箇所で接続しています。
+5V デジタル系
オプションの頭部ボードに必要な電力を供給します。頭部ボード内で必要な電圧(3.3Vなど)は頭部ボード内で作ります。省電力制御も頭部ボード内で行いますので、電源(電池など)から逆流防止用のダイオードを介して直接、頭部ボードに電力を供給します。メインボード内では省電力制御は行いません。
サーボモータの電源には省電力制御用の IC( スイッチ )がサーボモータと直列に設けてあります。このスイッチはプログラムにより ON/OFFすることができます。省電力にしたい場合や、電源電圧( 電池容量 )を検出して電圧不足でサーバモータの動作が不安定になることを防ぐことができます。
詳細はこちらをご覧ください。
プリント基板上の実装
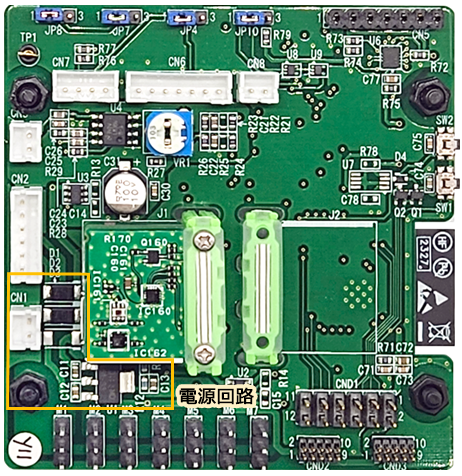
電源( 電池 )はコネクタ CN1 で接続します。電源スイッチを搭載するサブ基板はコネクタ CN2で接続します。
隣接する R11, R12, C13 は電源電圧( 電池 )の電圧測定用の分圧回路です。
電源回路は +5V アナログ系、 +5V パワー系、+5V デジタル系、3.3V系に分けて配線しています。各系統のグランドは電源回路の LDOレギュレータの端点で一点アースにしています。
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- 複数のMCUをつなぐ: このロボットには複数の MCUが搭載されています。その MCU間の接続の概要です。
他のWebサイト
- ニッケル水素電池に関する注意事項: ロボットの組み立て方 / Qumcum ホームページ / 株式会社CRETARIA
- 二次電池について(ニッケル水素電池): ニッケル水素電池の説明 / 公益社団法人日本電気技術者協会
- エネループ(製品): パナソニック株式会社
- LDO・フォールドバック・フの字回路・制限電流回路: トレックス・セミコンダクター株式会社
こちらのメーカは技術的に参考になる情報を多く掲載しています。
