サーボモータを動かしたり複数の MCUや頭部ボードを搭載することにより消費電力が増大します。ロボットは電池駆動なのでできるだけ消費電力を抑える必要もあります。そのための省電力制御を回路の各所で行っています。
◀ この記事の前に: 複数のMCUをつなぐ
▶ この記事の次に:
省電力制御の概要
省電力は以下の部分に分けて制御を行っています。
- MCU: MCU自らの省電力機能と Leafonyの省電力機能を使用した省電力制御
- 表示デバイス: OLEDの省電力機能を使用した省電力制御( コマンドによる制御 )
- +5VA系統: 発音発声用アンプの電源の ON/OFF制御
- +5VP系統: サーボモータ、UTOFの電源の ON/OFF制御
- 頭部ボード: 頭部ボード(オプション)の省電力制御、制御内容は頭部ボードに依存
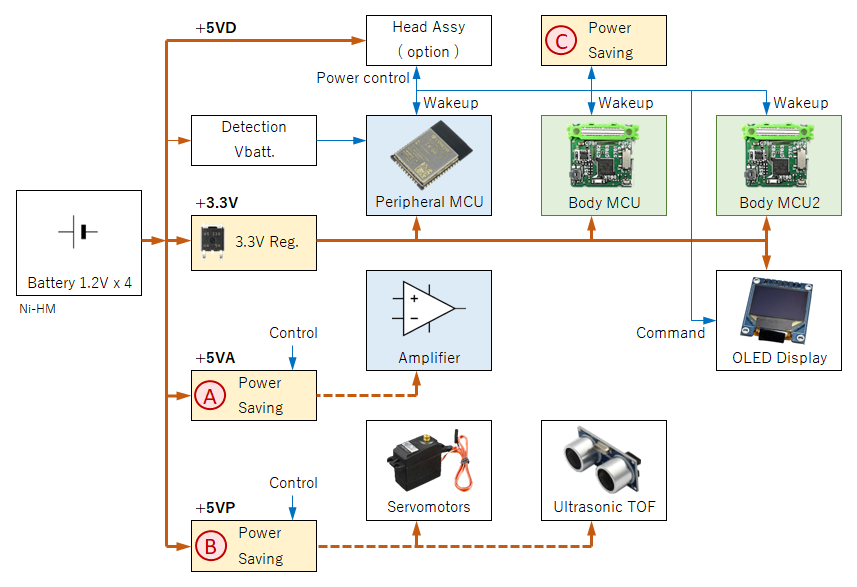
省電力制御を目的とした回路構成は以下のとおりです。( 図中のA,B,Cに相当 )
- A: +5VA系統の電力を制御するための回路
- B: +5VP系統の電力を制御するための回路
- C: MCUの省電力を目的とした外部起動(ウエイクアップ)のための MCU間の相互通信の回路
MCUとLeafony Blocks
多くの機能を搭載すること、柔軟な回路を構成すること、複数の MCU連携を究めることを目的としているため、このロボットは複数の MCUを搭載することができます。標準の構成で Body MCUと Peripheral MCUの二つの MCU、オプションで Head MCUと Body MCU2 の二つのMCUを追加することができ、合計で最大4つの MCUを搭載することができます。多くの MCUや頭部ボードを搭載することにより消費電力が増大します。ロボットは電池駆動なのでできるだけ消費電力を抑える必要もあります。
MCUには省電力制御機能が内蔵されています。Leafony Blockは IoT用途のため多彩な省電力のためのしくみを持ちます。MCUと Leafonyはそれぞれの省電力制御機能で省電力を行います。対象となるデバイスは以下のとおりです。
- Body MCU、Body MCU2: Leafonyの省電力機能を使用、MCUは STM32または AVRが持つ省電力機能を使用
- Peripheral MCU: ESP32の省電力機能を使用
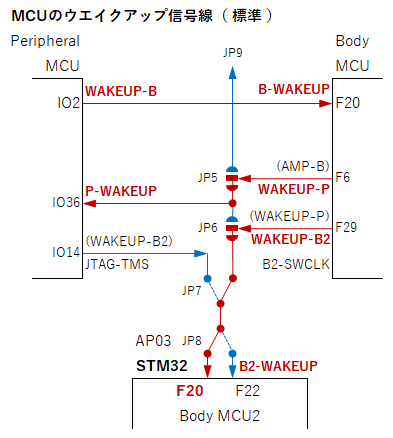
MCUが省電力モード(スリープ)から復帰(ウエイクアップ)する方法は、MCUの種類により複数あります。その中のひとつに外部からの信号によるウエイクアップがあります。ロボットに搭載している MCUは相互にウエイクアップすることができます。
詳細はこちらです。
表示デバイス
表示デバイスは使用しないときに電力消費量を抑えることができます。電力制御はドライバIC SSD1331で行います。SSD1331の電力制御は同ICのコマンドで行います。CSピンを Highにするだけでは SSD1331が低電力モードにはなりません。
詳細はこちらです。
周辺回路の省電力制御
サーボモータや発音発声のアンプの電源供給を制御します。周辺用の電源は以下の3系統です。
- +5VA系統: 発音発声用アンプの電源の ON/OFF制御
- +5VP系統: サーボモータ、UTOFの電源の ON/OFF制御
- 頭部ボード: 頭部ボード(オプション)の省電力制御、制御内容は頭部ボードに依存
+5VA系統
発音発声用アンプの電源の ON/OFF制御を行います。電源線の ON/OFFはロードスイッチ TPS22918で行います。
+5VP系統
サーボモータ、UTOFの電源の ON/OFF制御を行います。電源線の ON/OFFはロードスイッチ TPS22918で行います。
詳細はこちらです。
+5VD系統
オプションの頭部ボードに必要な電力を供給します。頭部ボード内で必要な電圧(3.3Vなど)は頭部ボード内で作ります。省電力制御も頭部ボード内で行いますので、電源(電池など)から逆流防止用のダイオードを介して直接、頭部ボードに電力を供給します。メインボード内では省電力制御は行いません。
詳細はこちらです。
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- 複数のMCUをつなぐ: このロボットには複数の MCUが搭載されています。その MCU間の接続の概要です。
他のWebサイト
- ニッケル水素電池に関する注意事項: ロボットの組み立て方 / Qumcum ホームページ / 株式会社CRETARIA
- 二次電池について(ニッケル水素電池): ニッケル水素電池の説明 / 公益社団法人日本電気技術者協会
- エネループ(製品): パナソニック株式会社
