サーボモータや発音発声のアンプの電源供給を制御します。
◀ この記事の前に: 複数のMCUをつなぐ
▶ この記事の次に:
+5VA系統
発音発声用アンプの電源の ON/OFF制御を行います。電源線の ON/OFFはロードスイッチ TPS22918で行います。制御は以下のとおりです。
- ON 端子 = Low : 出力 OFF
- ON端子 = High: 出力ON
この ICは突入電流の低減や立ち下がり時間を制御する機能が内蔵されていますが使用しません。オプションとして追加できるボード上の半田パターンを用意していますので追加で使用できます。( R13, C14, R14, C15 )
回路は以下のとおりです。(A)が+5VA系の電源制御用スイッチ、(B)が+5VP系の電源制御用のスイッチです。
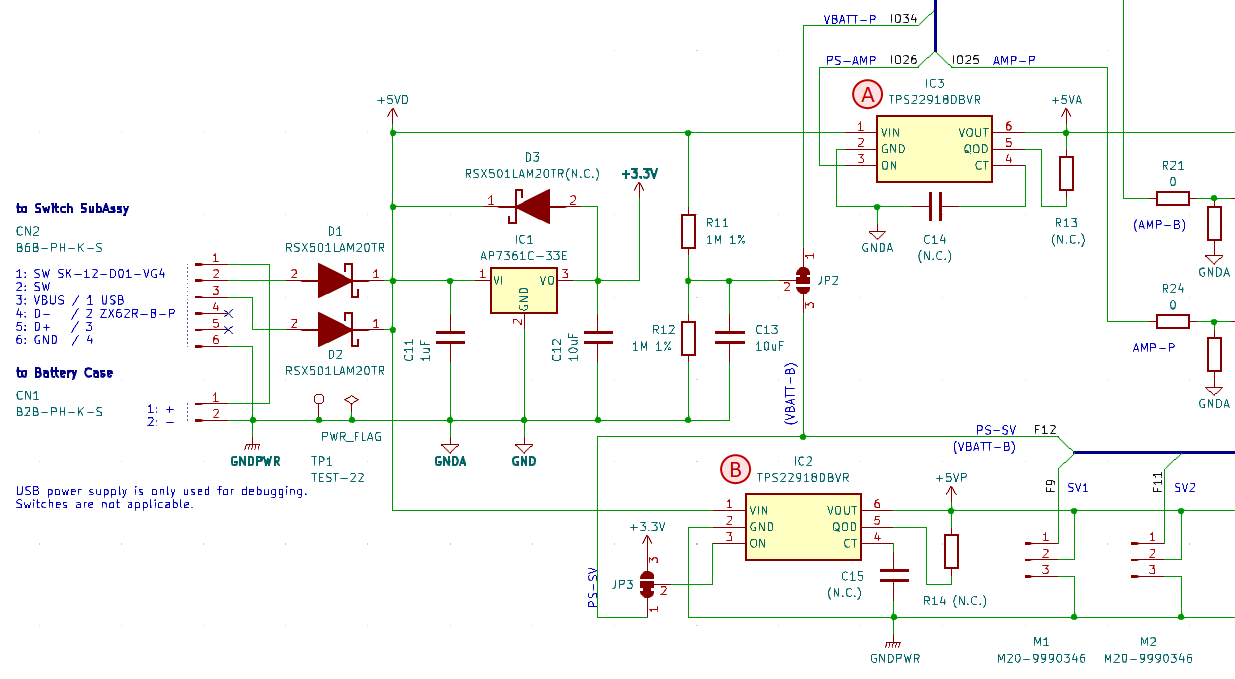
制御の信号線は以下のとおりです。
- +5VA系統: PS-AMP / Peripheral MCU – IO26
- +5VP系統: PS-SV / Body MCU – F12
+5VP系統
サーボモータ、UTOFの電源の ON/OFF制御を行います。電源線の ON/OFFはロードスイッチ TPS22918で行います。
標 準
Body MCUの F12( 信号線名は PS-SV )で制御する回路構成です。
プログラムで +5VP系統を制御します。( リセット時、スリープ時は Lowにして電源をOFFにする必要があります。 )
常時 ON( 注意点 )
サーボモータの電源を常時 ONにしたい場合、Body MCUの F12をオプションで電源電圧の測定用に転用した場合は、+3.3Vに接続します。
+3.3Vに接続することは大切です。+3.3V系統は安定した MCU他の主電源です。サーボモータを制御する MCUが安定して動作するためには +3.3V系統が安定していることが必要です。特に問題になる場合は、電源(電池)の電圧が低下したときです。+5VP系統はダイオードを介して直接、電源(電池)に接続しています。そのため、+3.3Vが MCUに電力を供給していなくてもサーボモータには電力が供給される状態になります。制御が不定(行われていない状態)でサーボモータに電力が供給されると不用意な動作になることがあります。この状態を防ぐために +3.3V系統が安定している状態ではじめて +5VP系統でサーボモータに電力を供給する必要があります。そのため、+5VP系統の電源系スイッチの制御は +3.3Vで行う必要があります。
回路図は前項( +5VA系統 )に含まれます。
Body MCUの F12はオプションで 電源電圧の測定用に転用できます。転用した場合は JP3の半田ブリッジジャンパを +3.3V側に接続( PS-SV側のパターンは切断 )する必要があります。
Technical Considerations TPS22918のON端子( 制御用のピン )
TPS22918のON端子は、仕様によりON側またはOFF側に固定することが必要です。電位が定まらないフローティング状態は禁止されています。オプションで Body MCUのF12を電源電圧の測定用に転用した場合、JP3が標準のままでは接続先がなくなりフローティング状態になりますので、必ず +3.3V側に切り換える必要があります。
頭部ボード( +5VD系統 )
オプションの頭部ボードに必要な電力を供給します。頭部ボード内で必要な電圧(3.3Vなど)は頭部ボード内で作ります。省電力制御も頭部ボード内で行いますので、電源(電池など)から逆流防止用のダイオードを介して直接、頭部ボードに電力を供給します。メインボード内では省電力制御は行いません。
頭部ボードに胴体側の MCU( メインボード上の MCU )から信号を送ることができます。その信号は省電力制御を想定していますが、他の用途に使用することも可能です。また、信号伝達の方向性もプログラムにより変更することができ多目的に多彩に使用することができます。
詳細はこちらです。
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- 複数のMCUをつなぐ: このロボットには複数の MCUが搭載されています。その MCU間の接続の概要です。
他のWebサイト
- ニッケル水素電池に関する注意事項: ロボットの組み立て方 / Qumcum ホームページ / 株式会社CRETARIA
- 二次電池について(ニッケル水素電池): ニッケル水素電池の説明 / 公益社団法人日本電気技術者協会
- エネループ(製品): パナソニック株式会社
