ロボットのハードウエアをブロック図で示しました。
◀ この記事の前に: ハードウエアの特徴
▶ この記事の次に: Leafony を選択した理由
基本的な構成
基本的な回路構成は以下のとおりです。
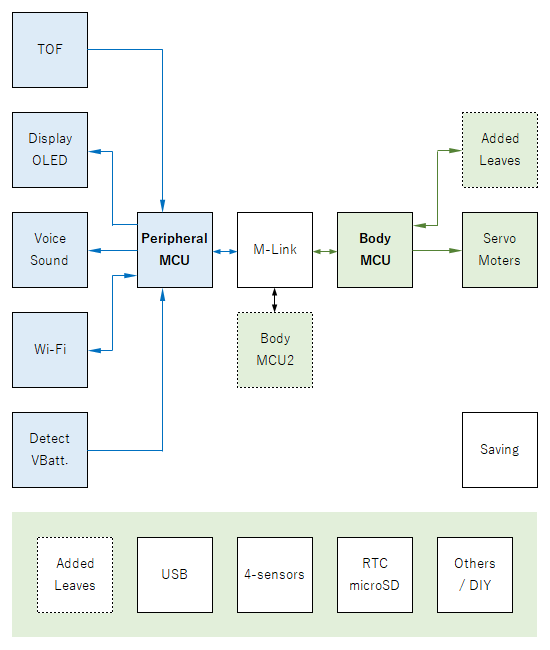
- Body MCU:
胴体ボードに搭載している Leafony Block 内の MCU(STM32)、ロボットのメインMCU - Peripheral MCU:
周辺回路を制御する MCU(ESP32) - M-Link:
搭載している複数のMCU間でデータ交換する回路
周辺回路ブロック
- Display OLED: ロボットの内部状況の表示、ロボットからのメッセージ、デバッグ時など多様に使用する表示装置。有機ELディスプレイ 0.95インチ RGB 96×64ドット
- Voice Sound: Peripheral MCU に内蔵している DACの出力(音声や音)を増幅するアンプとスピーカー
- Servo Motors: ロボットの四肢と頭部を動かすサーボモータ( 計7個 )
- Detect VBatt: 電源電圧を測定する回路、Body MCU の ADC入力
- Saving: 省電力に関係する回路、各MCUと頭部ボードの電力制御と M-Linkの切換え
- Added Leaves: Leafony Blockに リーフを追加して機能拡張を実現、自作したカスタムリーフも可能
オプションを追加した構成
以上の基本的な構成に加えて、以下を拡張することができます。頭部ボードは指定のもの以外にも、仕様を満たす自作ボードを使用できます。
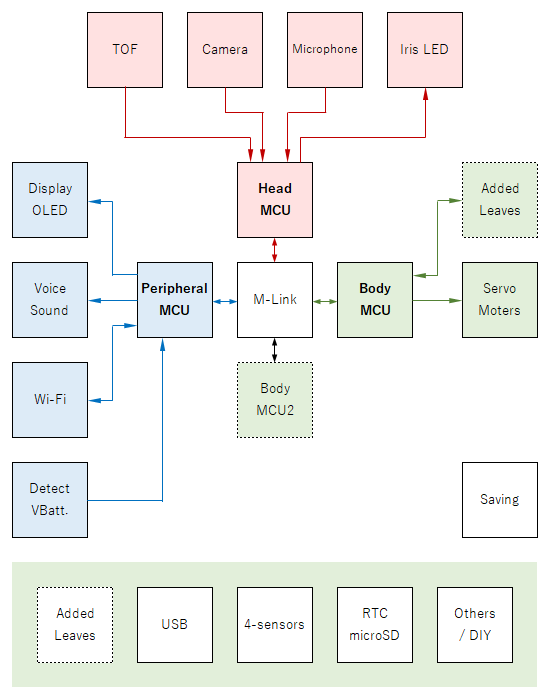
- Head MCU: 頭部ボードの MCU、主にセンサ関連を制御、複数 MCU構成にすることも可能
- TOF: TOFは Time of Flight(飛行時間)の略、反射式で距離を測定
- Camera: カメラで動画、静止画を撮影
- Microphone: 複数の MEMSマイクロフォンを搭載、ビームフォーミングで発音位置を定位可能
- Iris LED: 光彩をLEDで実現、表情を表す
条件を満たす Leaf(ボード)を追加できます。以下は例です。
- USB Leaf: Arduinoで開発を行うときPCと接続
- 4-Sensors Leaf: 温度・湿度・照度・加速度を測定可能
- RTC microSD Leaf: Micro SDを搭載して大容量のメモリを使用可能
- その他 / DIY: 条件を満たす以上のリーフ以外も使用可能。Leafony Busの仕様とロボットのハードウエア条件を満たす自作リーフにも対応可能
Design Considerations 胴体ボードには最大2つの Leafony Blockを搭載できます。二つの Leafony Blockを搭載した場合、Leafony Block間は並列と直列の接続ができます。直接接続にした場合は、個々のLeafony Blockに MCUを搭載することができます。
頭部ボードにも複数の MCU( Head MCU )を搭載することができます。
Technical Considerations ロボット1台で最大5個のMCUを搭載することが可能です。但し、電源容量に上限がありますので十分に検討してプログラム設計を行う必要があります。ロボットには省電力機能がありますので適宜活用してください。
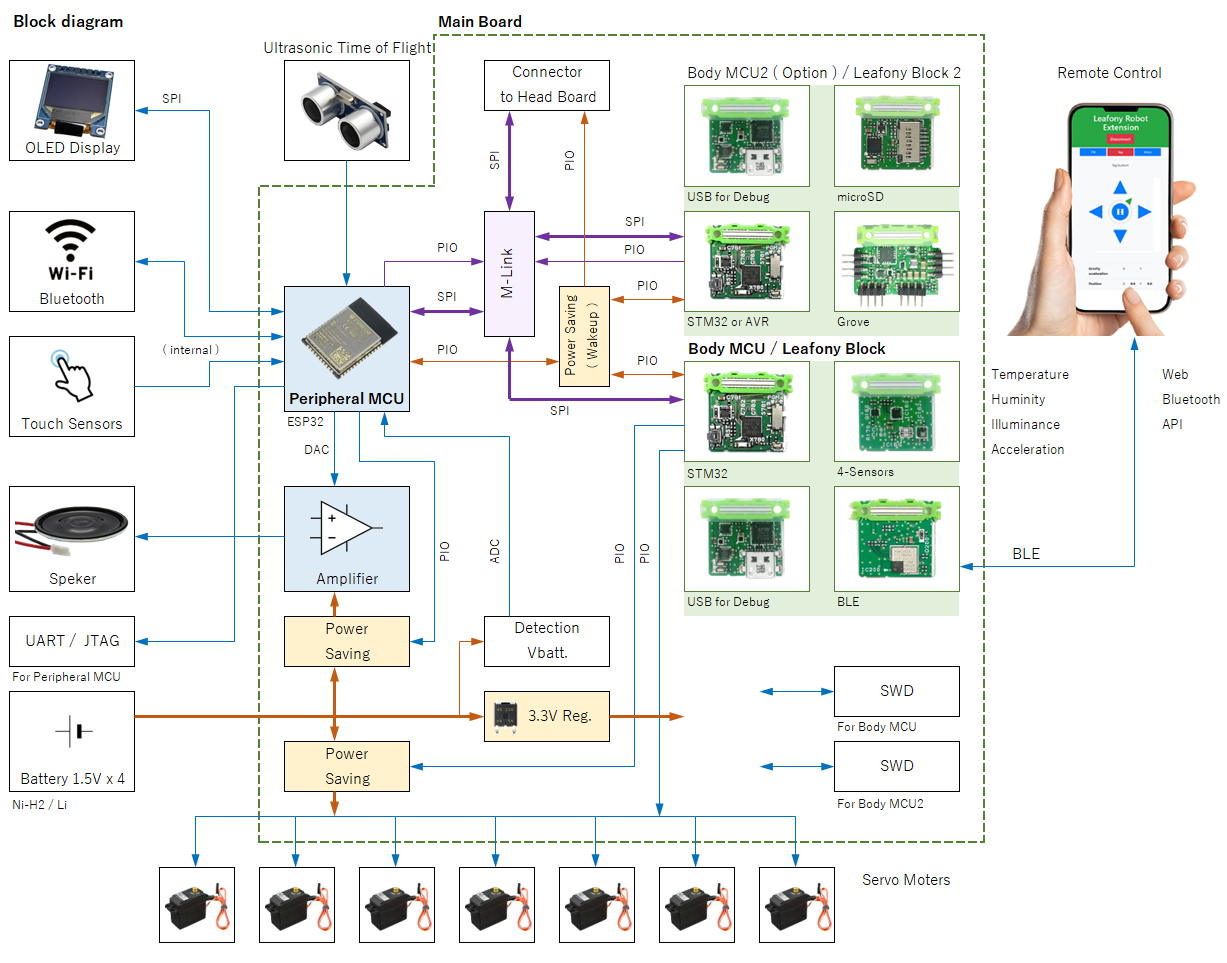
詳細な構成図
詳細な構成は以下のとおりです。( 図をクリックすると拡大表示します。 )
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- 複数のMCUをつなぐ: このロボットには複数の MCUが搭載されています。その MCU間の接続の概要です。
他のWebサイト
- SN74LVC1G3157 SPDT アナログスイッチ Datasheet
