Qumcum Lab. は物理的な身体を持ちます。コンピュータ上の物理的な身体がない(仮想的な)ロボットとは異なります。Qumcum Lab. は「身体性」を強く意識しています。
◀ この記事の前に: ハードウエアの仕様
▶ この記事の次に: ハードウエアの特徴
身体を持つロボット
人は身体を介して外界を知り、理解し、外界に対して働きかけ、身体を通じて外界とやりとりします。身体を通じて感じたり動いたりすることに注視したしたものが身体性です。物理的な身体を持つ Qumcum Lab. は周辺(環境)との関係を通じて知覚、学習、行動を行うことができます。環境を意識しないと環境に適応して、柔軟な動作を実現することはできません。
なぜ身体性を重視するのか
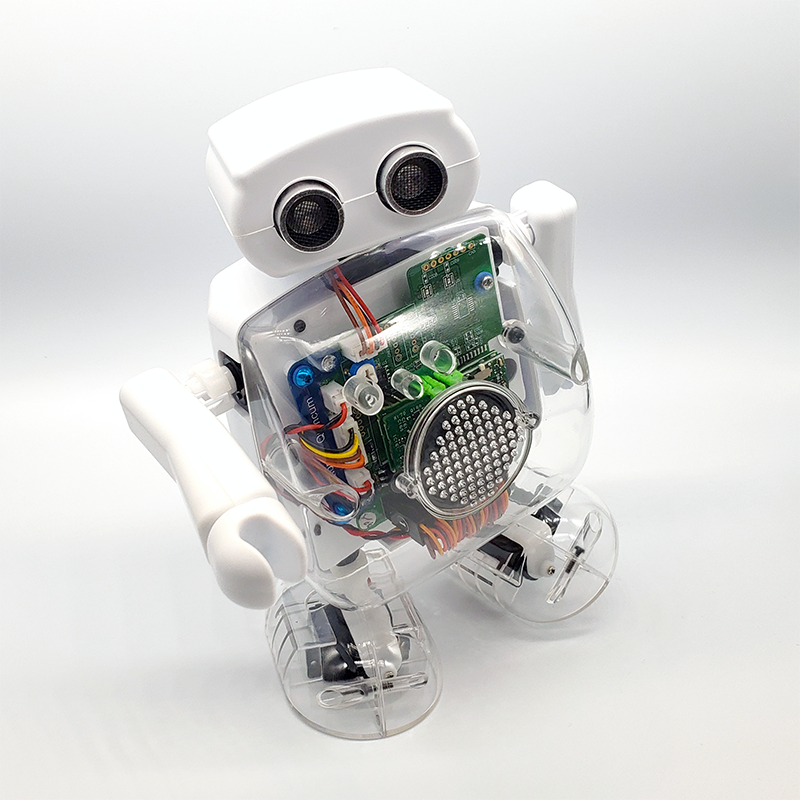
Qumcum Lab. はヒューマノイドです。
ヒューマノイドの動作(運動)は身体性を意識しないとうまく動きません。例えば二足歩行では片足ずつ前にだせば歩けるように思いますが実際に歩かせることはできません。そこには重力や動かしたときの慣性が伴うからです。この重力や慣性は身体というものに働く力です。これらを意識しないと歩かせることはできません。
このように常に物理的な身体というものを意識しないと実際に動かすことはできません。そのため身体性を意識できるような構造と基本的な機能を持たせています。実際に動作させることにより、人が行っていることの理解を進められることを願っています。そこからロボットやAIの特徴や違い、それぞれの優れた点などを見いだすことにより、構造の拡張やプログラミングをより深く考えたり、その先に相互の新しい関係性が創造できることを目指しています。
感覚と表情を重視してみる
ロボットの感覚と表情を重視するために以下を配慮しました。
- 感覚: センサで外界の状況を把握する
- 表現: 発音、表示、動作で表情を表す
四肢の動作はサーボモータで行います。ダンスでは滑らかな動きや素早い動き、表現したい内容に合わせて動き方を変えます。サーボモータを目標確度まで回転させることは簡単ですが、その時の速度、さらには加速度や減速度、またその開始確度を柔軟に変更することにより、動作による表現が可能となります。複数のモータを協調させることによりさらに表現の幅は広がります。同時にその制御を簡単に行わせることができることも必要です。

Qumcum Lab. は人に近い感覚を得ること、表現を行えることを重視しました。
モータ制御の基本機能は最初から実装しています。低位の制御を気にせずに動作に視座を置いた制御ができます。オプションになりますが、頭部ボードや Leafonyのセンサボードを追加することにより多彩な感覚器を使用することができます。また、感覚と表現を柔軟に結び付けるための MCUリソースを持つため、AIの搭載やクラウドとの連携も可能です。
身体性を意識した構造と機能
身体性を意識した構造と機能は以下のとおりです。
- ヒューマノイド: Humanoid 人の形をしたロボットです。
- 四肢: 足と手を持ち二足歩行や身体の動きによる表現ができます。
- 完全二足歩行: 足の交互の踏み出しにより歩行します。二足のロボットでも足裏に車輪が付いてるロボットもあります。二足歩行でも片足立ちになることがなく、摺り足で相互に踏み出し歩行するロボットも少なくありません。Qumcum Lab.は歩行時に片足立ちによる体重移動により歩行をおこないます。このためには重心移動を考慮することと同時に転倒防止を意識する必要があります。
- 加速度付台形制御: 各関節(サーボモータ)は加減速を変更可能な台形制御ができます。この制御により柔軟な動作や、多彩な身体表現(表情豊かなダンスなど)ができます。
- 協調運動制御: 四肢の動き、複数のサーボモータの動作を連携させながら全体として滑らかに動かす制御です。歩くためには一歩踏み出すなど、まとまった動作があります。動きを階層化しています。
- 機能局在: 人の脳は特定の領域が特定の機能を担っているという考え方です。Qumcum Lab.は複数の MCUを持ち機能を分担しています。
- M-Link: 複数の MCUは相互に接続していて情報交換を行えるような構造と機能を持っています。脳の複数の野が連携していることを模倣しています。
- 半球睡眠: 渡り鳥などの一部の動物では脳が部分的に睡眠することができます。Qumcum Lab. は複数の MCUを持ちますが別々にスリープ状態に移行することができ、他の MCUからuウエイクアップすることもできます。この目的は主に省電力です。
- ビームフォーミング: 複数のマイクロフォンにより音場定位が可能です。(オプション)
- 音声認識: マイクロフォンにより外部の音声を認識することが可能です。(オプション)
- 発声・発音: 発声機能により言葉を発することが可能です。(オプション)
- 画像認識: 画像(動画、静止画)により外部の状況把握が可能です。(オプション)
- 測距: TOPにより対象物の距離を検出します。(オプション)
- 体性感覚: タッチセンサにより感触を検出します。(オプション)
- 温度・湿度: 温度・湿度センサにより環境把握が可能です。(オプション)
- 平衡感覚: 加速度センサにより身体の傾きや動きの加速度を検出します。(オプション)
- 光彩: 光彩はLEDにより多彩な表情を表すことが可能です。(オプション)
- テレパシー: BLEや Wi-Fi機能です。私は持っていませんが Qumcumはテレパシー機能を持っています。
- エモーションディスプレイ: 気持ち(内部状態)を表現するための OLEDディスプレイを備えています。
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- 複数のMCUをつなぐ: このロボットには複数の MCUが搭載されています。その MCU間の接続の概要です。
他のWebサイト
- 身体の動きやカタチから「知」が生じるというロボットの設計論 名城大学 産官学連携・研究支援サイト(MRCS)
- ロボットにおける身体性と認知・行動の関係 東京大学大学院総合文化研究科
- 特集「空間知-私たちの生活を支える脳・身体の拡張空間の創出-」 計測と制御2009年12月号/計測自動制御学会
