Body MCU で使用している STM32の起動時の動作と、プログラム書き込みを説明します。
◀ この記事の前に: Peripheral MCU / ESP32 のピン配置
▶ この記事の次に: リセットとプログラム書き込み(Leafony)
STM32 のリセット
Body MCU は MCU Leafとして STM32を搭載しています。リセットは STM32の仕様、Leafony の仕様に基づきます。詳しくは以下をご覧ください。
・Leafony STM32 リーフ: Datasheet / LEAFONY SYSTEMS 株式会社
プログラムの書き込み
プログラムの書き込み方法は以下のとおりです。
本サイトでは Arduino IDE を使用したプログラミングを想定しています。接続方法は USBによる接続です。
- USB: Leafony Block または Leafony Block2 に BLE Leafを搭載して USBで PCと接続
- SWD: メインボード上の SWDコネクタ( CND2 または CND3 )で接続
- ST-LINK: メインボード上の SWDコネクタで ST-LINKで接続
詳しくは以下をご覧ください。
・Leafony STM32 リーフ: Datasheet / LEAFONY SYSTEMS 株式会社
Technical Considerations SWDとは
SWD(Serial Wire Debug)は、ARM Cortex-M系 MCU向けの2線式のインターフェースです。プログラミング書き込みやデバッグを行えます。STM32の場合は、ST-Link を使用します。対応しているツール( ハードウエア )は、ST-LINK/V2、STLINK-V3SET、STLINK-V3PWRなどがあります。対応している開発ツール( ソフトウエア )は、STM32CubeProgrammer(書き込み)や STM32CubeIDE(開発&デバッグ)があります。
詳しくはこちらをご覧ください。
回 路
回路は以下のとおりです。

接続コネクタ
外部との接続は以下のコネクタ CND2, CND3で接続します。コネクタは CND2, CND3 とも同じで以下のとおりです。Leafony Block とコネクタの対応は以下のとおりです。
| 対象 MCU | MCU | 名 称 | 種 類 |
|---|---|---|---|
| Body MCU | Leafony Block | CND2 | SWD |
| Body MCU2 | Leafony Block2 | CND3 | SWD |
- CND2, CND3: FTSH-105-01-L-D / コネクタヘッダ スルーホール 10 極 0.050インチ(1.27mm) / Datasheet / Samtec Inc.
- CND2, 3: 0010897120 / 2.54mm Pitch C-Grid Breakaway Header, Dual Row / Datasheet / Molex, LLC
CND2
| Pin No. | Name | Category | Port / Pin | Source |
|---|---|---|---|---|
| 1 | +3.3V | SWD | ||
| 2 | B-SWDIO | SWD | F5 | Body MCU |
| 3 | GND | SWD | ||
| 4 | B-SWCLK | SWD | F29 | Body MCU |
| 5 | GND | SWD | ||
| 6 | ( SWO ) | SWD | ||
| 7 | ( Key ) | SWD | ||
| 8 | ( NC ) | SWD | ||
| 9 | GND | SWD | ||
| 10 | B-RES | SWD | F5 | Body MCU |
CND3
| Pin No. | Name | Category | Port / Pin | Source |
|---|---|---|---|---|
| 1 | +3.3V | SWD | ||
| 2 | B2-SWDIO | SWD | F32 | Body MCU2 |
| 3 | GND | SWD | ||
| 4 | B2-SWCLK | SWD | F59 | Body MCU2 |
| 5 | GND | SWD | ||
| 6 | ( SWO ) | SWD | ||
| 7 | ( Key ) | SWD | ||
| 8 | ( NC ) | SWD | ||
| 9 | GND | SWD | ||
| 10 | B2-RES | SWD | F35 | Body MCU2 |
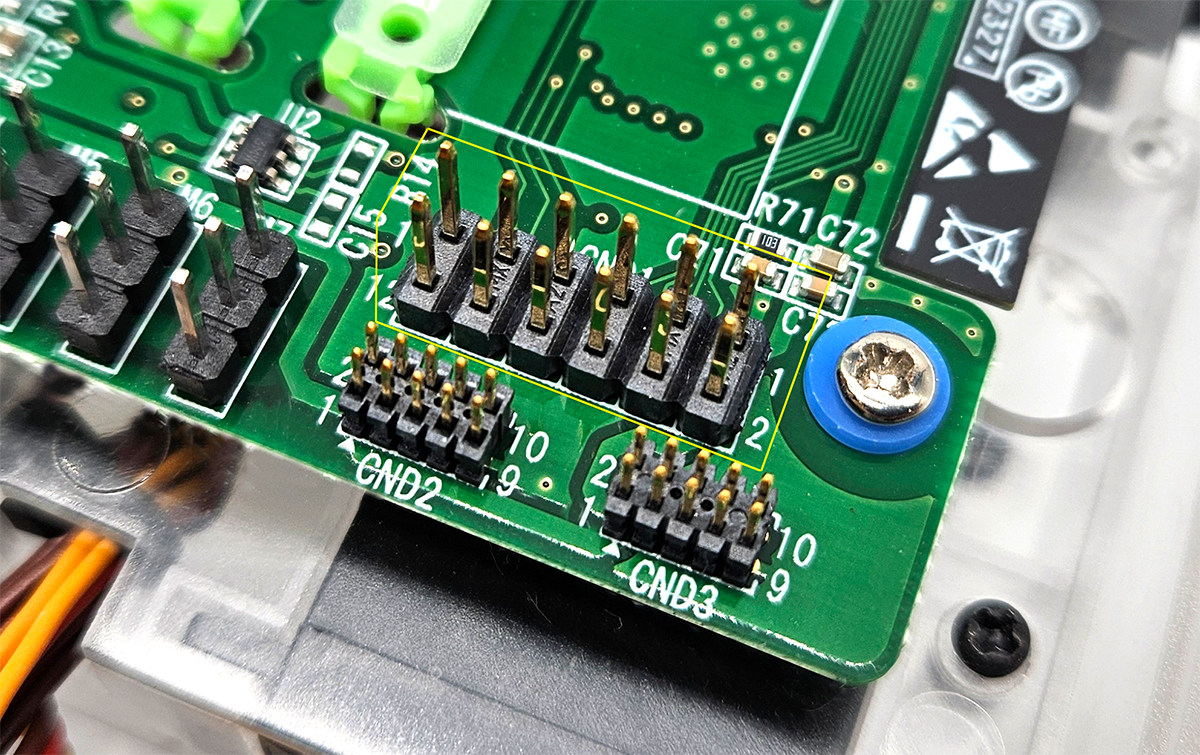
プリント基板上の実装( プログラム書き込み用コネクタ )
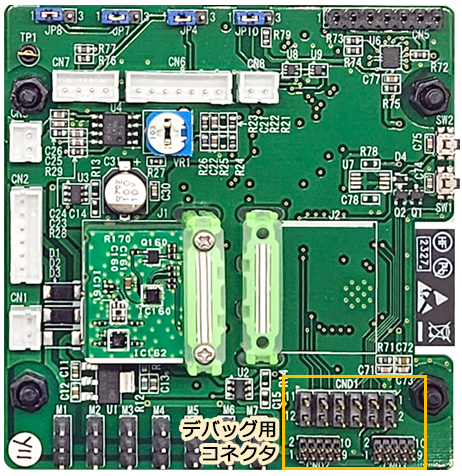
SWD通信の接続用のコネクタ CND2, CND3 はメインボードの右下にあります。
コネクタはピンヘッダの形状です。SWDで多用するレセプタで接続します。
レセプタ: 1.27mmピッチのハーフタイプ 12ピン
隣接して ESP32の デバッグ用コネクタ CND1 があります。
STLINK-V3PWR と CND1を接続した例

コネクタ CND1の周辺
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- 複数のMCUをつなぐ: このロボットには複数の MCUが搭載されています。その MCU間の接続の概要です。
他のWebサイト
- マイコンプログラム実装【ST-LINKを使ったプログラム転送】: SWDの概要と事例 / モノ作りエンジニア
- SWDって何?: 信号などの説明 / JTAG総合情報サイト
