頭部と四肢(手足)を動かすサーボモータです。7軸のサーボモータを搭載していて個々に制御を行うことができます。
◀ この記事の前に: 複数のMCUをつなぐ
▶ この記事の次に:
サーボモータの仕様
搭載しているサーボモータはすべて同じ仕様です。取付場所により可動角度が異なります。各サーボモータにはそれぞれ各部位と接続する部品が付いています。軸の位置も出荷時に調整済みです。

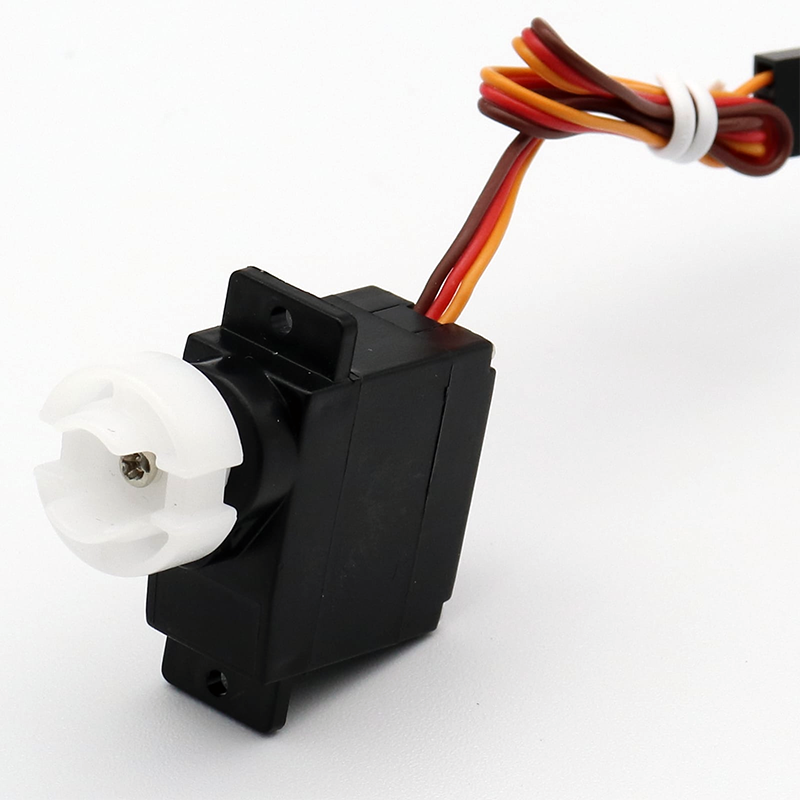
- 質量: 9 g
- 寸法: 22.2 x 11.8 x 31 mm
- 静トルク: 1.8 kgf·cm
- 角速度: 0.12 s / 60°
- 電源電圧: 3.3 V ( ~6V )
- 使用温度範囲: 0 ºC – 55 ºC
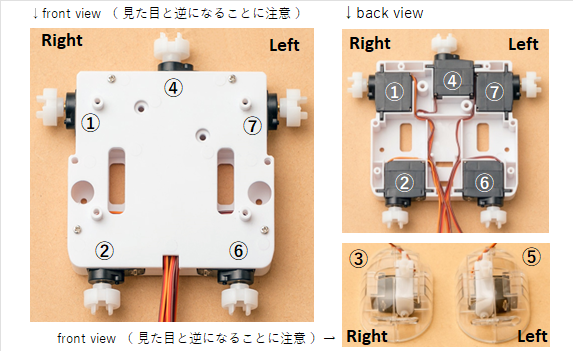
各部位の割付け
頭部、四肢の各部位の割付けは以下のとおりです。
Qumcum Lab. にとっての腕、足となりますので、こちら(外側)から見た左右と逆になります。頭部、腕はそれぞれひとつのサーボモータが対応します。足部はひとつの足部に脚と足の2つのサーボモータが対応します。合計で4つのサーボモータで歩行を行うことになります。
各サーボモータは部位に応じて回転方向と可動範囲が異なります。
同じ腕でも取り付け方向によって、前に振るときのサーボモータの回転方向は逆になります。足部も同様です。以下の表は各部位のサーボモータの回転方向と可動範囲です。サーボモータの回転方向は、軸の正面から見て時計回りがCW( Clock Wise )、逆時計回りがCCW( Counter Clock Wise )です。基準角度は初期の姿勢( 直立 )時のサーボモータの角度になります。
サーボモータの部位ごとの回転方向と可動範囲
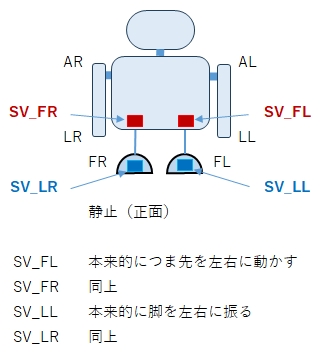
Qumcum Lab. を正面から見た図です。
左右は Qumcum Lab. にとっての左右です。そのため正面から見た場合( 見た人 )の左右とは逆になります。
サーボモータの名称は、そのサーボモータのある位置を名称にするのではなく、動かす対象を名称にします。足( foot )は足にあるサーボモータでなく、胴体にあり足を動かすサーボモータとして名付けます。
足と脚の違い
足 / foot: 足首(ankle)より下の部分、足裏や足首から下の部分を指します。
脚 / leg: 足首(ankle)より上の部分、腿(もも)の付け根から足首までの部分を指します。
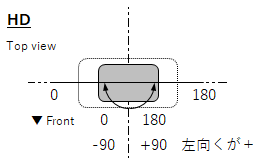
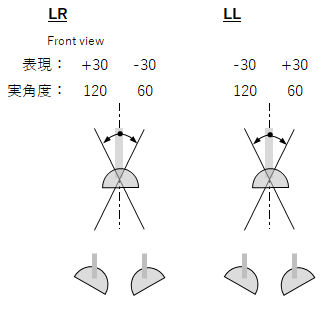
動作方向と可動範囲
各部位の動作方向と可動範囲です。実角度はサーボモータの軸角度、「表現」は Qumcum Lab. の部位として見た場合の角度です。Qumcum Lab. の頭部と四肢の位置は、Qumcum Lab. としての位置( 角度 )として表現して扱っています。この場合の位置を「ポジション」と呼びます。( 例:腕を上に上げるは左右の腕どちらも「上に上げる」という表現になります。)実際はサーボモータの取付方向などで、サーボモータとしての角度とポジションは異なります。( 腕は左右で取り付け位置が反転するため左右逆になります )


| No. | 略 称 | 部 位 | CW | CCW | 上限角度 | 下限角度 | 基準角度 |
| ① | AR | 右腕 / Arm Right | 下 | 上 | 0 | 180 | 0 |
| ② | FR | 右足 / Foot Right | 外 | 内 | 60 | 120 | 90 |
| ③ | LR | 右脚 / Leg Right | 開く | 閉じる | 50 | 130 | 90 |
| ④ | HD | 頭部 / Head | 右 | 左 | 0 | 180 | 90 |
| ⑤ | LL | 左脚 / Leg Left | 閉じる | 開く | 50 | 130 | 90 |
| ⑥ | FL | 左足 / Foot Left | 内 | 外 | 60 | 120 | 90 |
| ⑦ | AL | 左腕 / Arm Left | 上 | 内 | 0 | 180 | 180 |
CW: 出力軸側から見て時計方向(正転)/ Clock Wise 時計回転
CCW: CCW:出力軸側から見て反時計方向(逆転) / Counter Clock Wise 逆時計回転
サーボモータの制御方法
使用しているサーボモータは DCサーボモータです。制御は PWM( Pulse Width Modulation / パルス幅変調 )で行います。PWM制御はサーボモータの信号線に一定の周波数の矩形波を送ります。その波形の中の ON時間を変化させることによりサーボモータの軸の角度を指示します。軸の角度を指示すればその角度になりますので、モータそのものの電気的な制御でなく角度の制御になります。
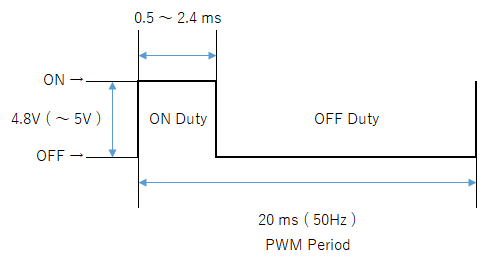
ONになっている部分を( 上図では 0.5 ~ 2.4 ms )ONデュティ、OFFになっている部分を OFFデューティを呼びます。この比率を デューティ比といいます。( デューティ:duty )
PWM 制御の仕様
左の波形は PWMの制御波形です。仕様は以下のとおりです。
- 制御周波数: 50 Hz( 周期で 20 ms )
- ONデューティ: 0.5 ~ 2.4 ms
0°: 0.5 ms
180°: 2.4 ms - 駆動電圧: 4.8V( 最大 5V )
Qumcum Lab. の回路の主要電源の電圧は 3.3 Vです。サーボモータの駆動電圧は 4.8 Vなので省電力制御回路を介して直接、サーボモータに印加します。信号線も同様ですが、サーボモータを制御する Body MCU( Leafony Block の STM32 Leaf )に搭載している STM32は 5 Vトレラントであるため問題なく制御できます。
Technical Considerations 5 Vトレラント
多くの場合、ICの入出力電圧は電源電圧を超えることはできません。超えた場合は誤動作や破壊します。この場合、電圧の異なる回路との間に電圧変換を行うことが求められます。トレラントとは「耐性のある」という意味です。STM32の電源電圧は 3.3 Vですが、一部の端子ではそれを超える電圧でも使用できる機能があります。サーボモータの接続ピンは 5Vの電圧でも耐えられる端子「5 Vトレラント」であるため、直接サーボモータを接続して制御することができます。
Design Considerations ON デューティの時間分割制御
このサーボモータは制御周波数が 50 Hz、ONデューティが最大 2.4 msです。7軸すべての ON開始を一緒にせずに 2.5 msずらすことにより ON期間を分散化することができます。分散化により ON時に流れる電流と処理を分散化することができて、回路の電源負荷や MCUの処理時間を平均化することができます。( 一時的に大きな電流が流れることを防いだり、処理が偏ることより割り込み処理の多重発生を防ぐことができます。)詳しくは、ソフトウエア(制御)で説明しています。
サーボモータの省電力制御
サーボモータの電源には省電力制御用の IC( スイッチ )がサーボモータと直列に設けてあります。このスイッチはプログラムにより ON/OFFすることができます。省電力にしたい場合や、電源電圧( 電池容量 )を検出して電圧不足でサーバモータの動作が不安定になることを防ぐことができます。
詳細はこちらをご覧ください。
プリント基板上の実装
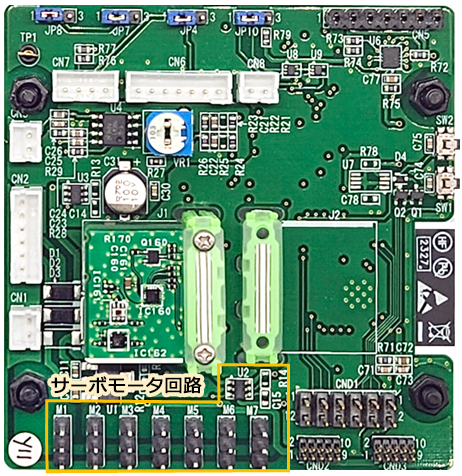
サーボモータの制御信号線はコネクタ( M1 ~ M7 )を介して直接、サーボモータの信号線端子に接続します。
サーボモータは 5Vで動作しますが、MCUの端子は 5Vトレラントなのでそのまま接続しています。モータの駆動系やソレノイドでは逆起電力電圧などの対策が必要ですが、サーボモータの中の制御基板と接続する信号線なので、これらの対策はしていません。
隣接する IC( U2 )はサーボモータの省電力制御用です。R14, C15は同 ICの遅延などを設定する外部部品です。( 使用していません。 )
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- 省電力制御: 省電力制御に関する概要
- 周辺回路の省電力制御: 電源系統別の省電力制御に関する説明
- Motion Interrupter( 概要 ): サーボモータ制御の最上位、Motion Interrupter の概要です。
- Motion Interrupter( 操作説明 ): アプリケーションからの操作方法です。( API )
- Motion Interrupter( コード ): コードの詳細を説明します。
- Motion sequencer( 概要 ): サーボモータの協調運動制御の概要です。
- Motion sequencer( 操作説明 ): シーケンスの開始・停止等の操作方法です。( API )
- Motion sequencer( コード ): コードの詳細を説明します。
- シーケンスデータ: シーケンスデータの仕様と作成方法です。
- Servomotor Driver( 概要 ): サーボモータそのものの制御です。( API )
- Servomotor Driver( 操作説明 ): 個々のサーボモータを制御する方法です。
- Servomotor Driver( コード ): コードの詳細を説明します。
