標準構成の Qumcum Lab. のソフトウエアの仕様です。標準構成ではサンプルプログラムを搭載しています。Qumcum Lab. はプログラミングを楽しんでいただくことが目的です。ホームページではサンプルプログラムの説明になりますので、ご使用者のプログラミングの参考用としてご覧ください。
◀ この記事の前に: 機能からみた全体像
▶ この記事の次に: リアルタイム制御を意識する
基本的な操作と動作( 基本仕様 )
Qumcum Lab. の内部構造( サンプルプログラム )は以下のとおりです。
分かりやすくするために主要な機能とデータを中心に記載しました。実際は複数の MCUが連携して実現していますが、ここではQumcum Lab. 全体として表現しています。

入力系
- 4-Sensors: 加速度センサ、照度センサ、温湿度センサ
Leafony Block に搭載した センサリーフです。ここから取得したデータを ” Sensors data “として定期的に更新します。 - 測距センサ: 超音波を使用した距離センサ
測距センサから超音波を発信して反射して受信するまでの時間を計測します。距離は ” Distance measurement data ” として定期的に更新します。
出力系
- サーボモータ: 頭部と四肢を動かすサーボモータ
頭部、四肢( 腕、脚、足 )を動かすための DCサーボモータを制御します。制御は階層化されていてサーボモータ単独での操作、あらかじめ設定した順序で動かす ” Motion Sequence Control “、アプリケーションからデータ(文字列)で制御するための ” Motion Interpreter ” で構成しています。 - 表示器( OLED ): 96 × 64 dotsの RGB ディスプレイ
内部状態を中心に Qumcum Lab. の状態をリアルタイムに表示します。 - 発声発音: スピーカ
操作や動作に合わせて発声、発音します。
通信系
- BLE: スマートフォンとの通信
リモコンとして使用するスマートフォンとの通信を行います。Leafony Block に搭載した BLEリーフです。 - Wi-Fi、Bluetooth: ( 使用していません。)
Peripheral MCU( ESP32 )に搭載している通信機能です。標準構成では使用していません。
その他
- 電源電圧検出: 電源電圧を検出することにより、電池容量を推定します。電池容量が少ない場合はシャットダウンします。
MCU別の機能構成
Qumcum Lab. は二つの MCUで構成しています。MCU別に分けたときの構成は以下のとおりです。
基本的な MCU間の関係
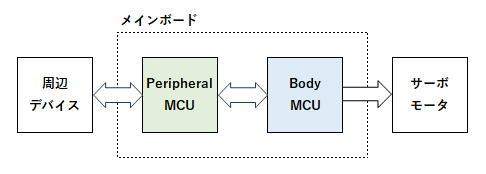
機能から見た MCU間の関係
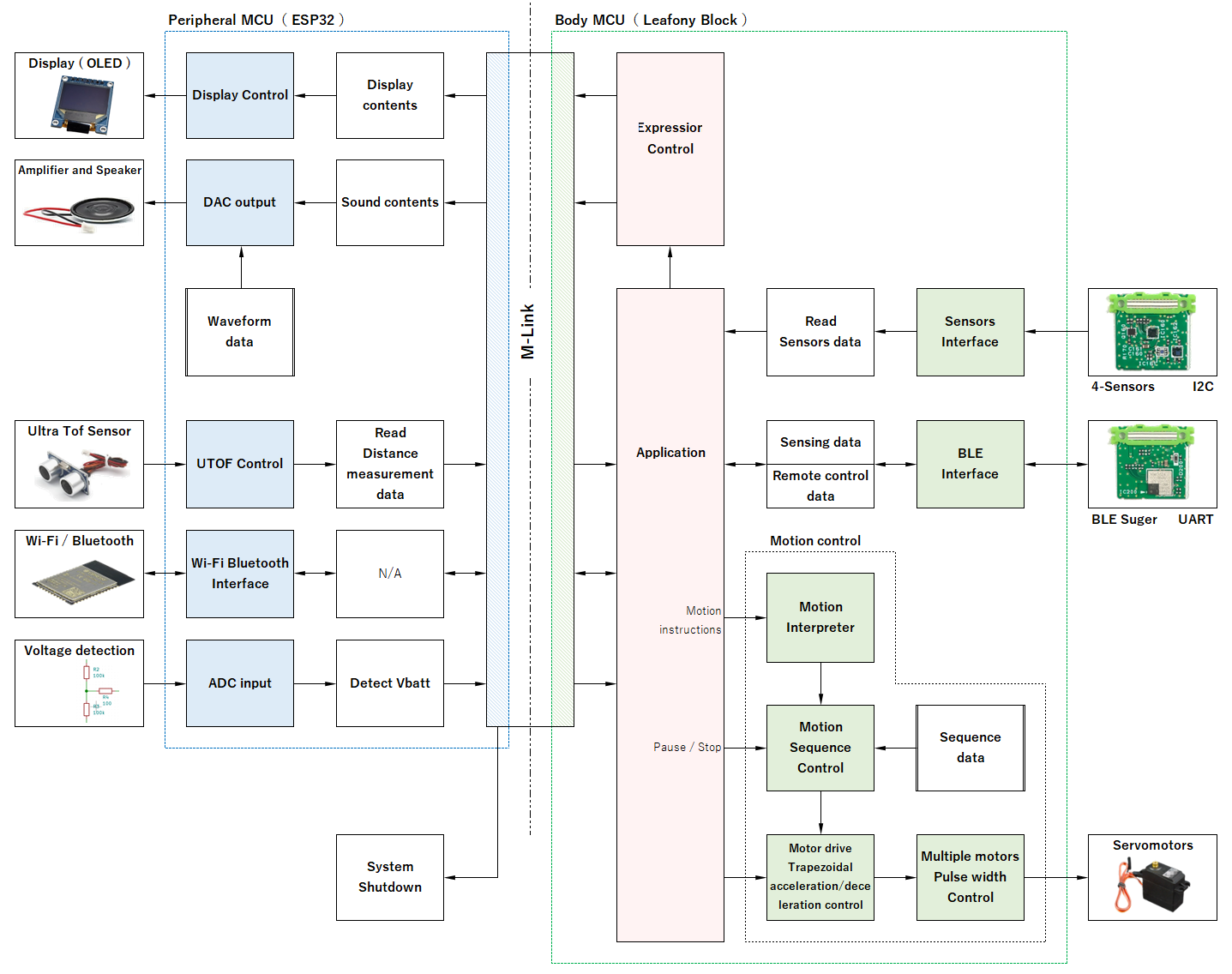
サーボモータを除く周辺機器は Peripheral MCUで制御します。サーボモータの制御、Leafony Block に搭載しているセンサや通信機能、サーボモータは、Leafony Block内の Body MCUで制御します。
ロボットとして全体の制御は Body MCUの ” Application ” が担います。情報の表現( 表示器、発音発声 )は ” Expression Control ” が行います。Peripheral MCU と Body MCUは ” M-Link ” を介して情報交換を行います。
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- 複数のMCUをつなぐ: このロボットには複数の MCUが搭載されています。その MCU間の接続の概要です。
他のWebサイト
- SN74LVC1G3157 SPDT アナログスイッチ Datasheet
