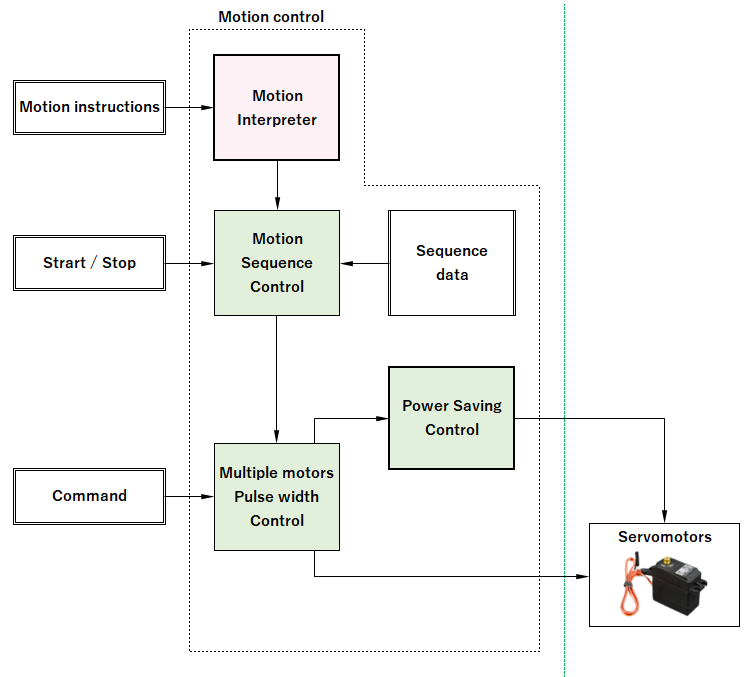
サーボモータの制御処理で最も高位のモジュールです。単独にサーボモータを動かすコマンドや、順序に従ってサーボモータを動かすシーケンス制御を統合しています。
◀ この記事の前に: サーボモータ制御の階層化
▶ この記事の次に: Motion interpreter( 操作説明 )
目 的
Motion interpreterは、サーボモータの操作を文字列(コマンド)により統合的に行います。信号( 言葉 )により動作を制御します。個々のサーボモータの単独制御、協調運動制御、協調運動制御の手順の書き込み、全体速度( テンポ )の設定、強制停止など、運動に関わるものを一元的に制御します。下位にMotion Sequencer( 協調運動制御 )があります。
Design Considerations 文字列で操作する意味
Motion interpreterは、サーボモータ制御の最上位にありアプリケーションとやりとりを行います。ヒューマノイドは多彩な機能を持つことを想定しています。その場合、高位の情報はやりとりが汎用的であることが望まれます。( 低位の情報はその量や速度から異なる場合があります。)リモートコントロールを含む通信や、他のシステムとの情報のやりとりも文字を使用することにより柔軟に対応することができます。そのため、高位のインタフェースを担う Motion Interpreterは文字にしています。
高速度の対応が必要な場合は、Motion Sequencer や Servomotor driver など各階層のインタフェースを使用します。これらは目的に適したデータ型でやりとりを行います。
機 能
Motion interpreterは、以下の機能を持ちます。
- 個々のサーボモータを即時操作する
- モーションシーケンサを制御する(指定、起動、停止)
- モーションシーケンスを読み込む
- 基底速度を変更する
説 明
文字でサーボモータを操作できるため、この処理に文字列を与える方法を変更することにより他の機能との柔軟な連携が実現できます。
例) スマートフォンからBLEなどで文字列を送信することによりスマートフォンをリモコンとして使用できる。
例) 歩行など一連の動作はシーケンスとして文字列で保管してシーケンスを選択指示することにより動作を託せる。
機 能
Motion interpreterは、以下の機能を持ちます。
- シーケンスの実行 / Execute sequence MI: サーボモータのシーケンスを強制実行する
下位制御: Motion sequencer - サーボモータの操作 / Move servomotor: 指定したサーボモータの目標位置(角度)に動作指示する
下位制御: Servomotor controller - 速度の操作 / Set speed servomotor: サーボモータの基底速度に変更する
下位制御: Servomotor controller - シーケンスの書き込み / Write sequence: サーボモータを順序立てて動かすシーケンス(データ)の一部は動的に変更ができる
Arduino IDEによる直接制御
試験用に Arduino IDEのモニタから Motion interpreterを制御できます。
Motion interpreterは文字列で制御できるため、PC上の Arduino IDEのモニタにサーボモータの動作指示を入力します。USBを介して Qumcum Lab. に入力した動作指示は Motion interpreterに渡されサーボモータの制御を行います。このしくみはデバッグ時の動作確認に便利です。
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- Motion Interpreter( 概要 ): サーボモータ制御の最上位、Motion Interpreter の概要です。
- Motion Interpreter( 操作説明 ): アプリケーションからの操作方法です。( API )
- Motion Interpreter( コード ): コードの詳細を説明します。
- Motion sequencer( 概要 ): サーボモータの協調運動制御の概要です。
- Motion sequencer( 操作説明 ): シーケンスの開始・停止等の操作方法です。( API )
- Motion sequencer( コード ): コードの詳細を説明します。
- シーケンスデータ: シーケンスデータの仕様と作成方法です。
- Servomotor Driver( 概要 ): サーボモータそのものの制御です。( API )
- Servomotor Driver( 操作説明 ): 個々のサーボモータを制御する方法です。
- Servomotor Driver( コード ): コードの詳細を説明します。
- サーボモータの制御( コード詳説 ): バックグラウンド処理の分散化の実現方法です。
- サーボモータ: サーボモータの回路です。ハードウエアの説明です。
