サーボモータに関する情報のインデックスです。詳細は各ページをご覧ください。
◀ この記事の前に:
▶ この記事の次に: サーボモータ( 設計・仕様 )
目次
設計に関する情報
サーボモータの仕様などのハードウエアと直接関係する部分から、協調運動の制御や他の制御との連携など高度な部分まで、Qumcum Lab.の仕様を満たすように設計しました。この設計情報はプログラミングの基礎となる検討の結果です。
- サーボモータ( 設計・仕様 )
サーボモータを制御するための仕様や制限、Qumcum Lab.で求められる仕様をまとめる。 - サーボモータ( 設計・全体像 )
サーボモータ制御の基本設計。制御方式やデータによる制御、階層化に関して検討する。 - サーボモータのリアルタイム制御( 分散制御 )
処理と出力の分散化するための構造と機能を検討する。プログラミングの基礎となる各数値を求める。 - サーボモータのリアルタイム制御( タイマ割り込み )
タイマ割り込みに関しての方式を検討する。可変割り込み方式を採用している。 - サーボモータ制御の階層化
アプリケーションから利用しやすく、かつリアルタイム制御を実現するため階層化を行った。
コードの実装に関する情報
仕様と設計に基づきプログラムの構造と関数を作成します。サーボモータの制御は3階層に階層化しました。階層ごとに説明します。
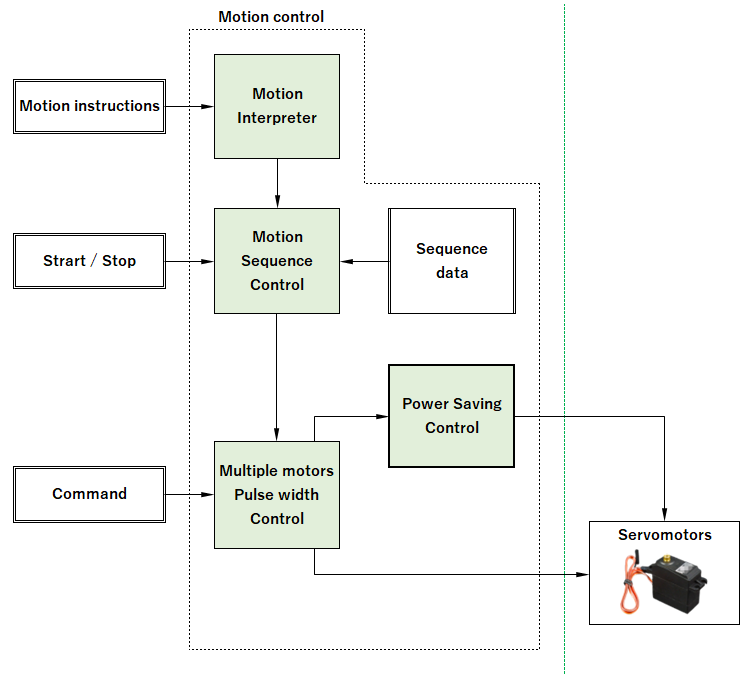
Motion interpreter / モーションインタープリタ
- Motion interpreter( 概要 )
アプリケーションと接する階層で文字列による指示でサーボモータを制御できる APIを提供する。 - Motion interpreter( 操作説明 )
アプリケーションからサーボモータを制御するための操作方法の説明
書き込み用シーケンスデータの仕様 - Motion interpreter( コード )
関数の説明、関連するデータや定義、コードの説明
Motion sequencer / モーションシーケンサ
- Motion sequencer( 概要 )
協調運動制御を行う。角度(ポジション)と基底速度に関しても説明します。 - Motion sequencer( 操作説明 )
シーケンサを開始、停止するための操作方法の説明 - Motion sequencer( コード )
関数の説明、関連するデータや定義、コードの説明 - シーケンス・データ
協調運動制御の指示書となるデータの仕様
Servomotor driver / サーボモータドライバ
- Servomotor driver( 概要 )
個々のサーボモータの仕様に基づき制御する。サーボモータ制御の最下位モジュール - Servomotor driver( 操作説明 )
サーボモータの軸を制御するための操作方法の説明 - Servomotor driver( コード )
関数の説明、関連するデータや定義、コードの説明 - サーボモータの制御( コード詳説 )
サーボモータ制御の補足説明、特に割り込み処理を詳説
関連する情報
関連する情報は以下のとおりです。
- ハードウエア / サーボモータ
サーボモータの仕様のまとめ - タイマ割り込み
タイマ割り込み処理の概要に関して説明 - 可変タイマ割り込み
サーボモータ制御専用のタイマとして使用 - 省電力制御( +5VP電源 )
サーボモータの省電力制御に関する説明
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- リアルタイム制御を意識する: リアルタイム制御の概要を説明しています。その MCU間の接続の概要
- リアルタイム制御の時間感覚: リアルタイム制御の時間に関する説明
- バックグラウンド処理とフォアグランド処理: 両処理の特徴に関して説明
- バックグラウンド処理で行う処理:
