QUmcum Lab. に搭載している複数の MCU間で通信を行う機能です。標準で 2つの MCUを 最大で4つの MCUを柔軟に連携します。
◀ この記事の前に: 複数のMCUをつなぐ
▶ この記事の次に:
MCU間の接続形態
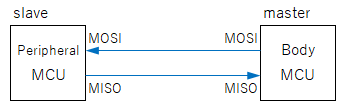
標準構成時の MCU連携
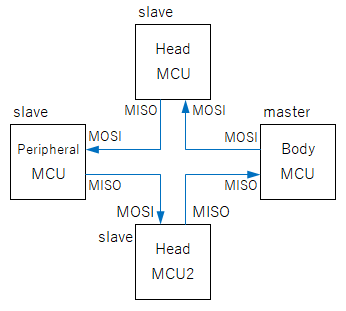
最大搭載時の MCU連携
複数の MCUは SPI( Serial Peripheral Interface ) で接続しています。
SPI接続にはいくつかの方式があります。標準モードはひとつのマスタにひとつもしくは複数のスレーブが並列に接続した接続方式です。デイジチェーンモードは複数のデバイスを直接接続します。ロボットで使用する接続方式は各MCUをシリアル(直列)に接続するデイジチェーンモード方式です。
各MCUのスリープはソフトウエアで行います。ウエイクアップは MCUの内部リソース以外に外部から行えます。概要は以下のとおりです。
- Body MCU: Peripheral MCUから信号線を介してウエイクアップします
- Peripheral MCU: Body MCUからの信号線を介してウエイクアップします
- Head MCU: Peripheral MCUからの制御で頭部ボードの電源を制御します
Design Considerations 切り換えの制御線は頭部ボードへの電力供給の制御用信号を兼ねますので、論理(High/Low)には注意が必要です。(各ICの入力論理と一致している必要があります。)
Technical Considerations Body MCU PA10 使用の注意点
半球睡眠をまねる
ロボットの省電力を「睡眠」として考えてみました。
さらに一部の動物が行っている「半球睡眠」を実現できる構成としました。
半球睡眠(英語:Unihemispheric slow-wave sleep、略:USWS)とは、脳の半分が眠り、残りの半分が覚醒している睡眠である。常に周囲の安全を確認する必要のある動物や長距離を移動する渡り鳥などの動物にみられる[1]。英語の別称:asymmetric slow-wave sleep。
引用:wikipedia
参考情報
他のサイトで参考になる情報は以下のとおりです。
このホームページ内
- 複数のMCUをつなぐ: このロボットには複数の MCUが搭載されています。その MCU間の接続の概要です。
他のWebサイト
- SN74LVC1G3157 SPDT アナログスイッチ Datasheet
- STM32L4 – SPI: SPI の概要 / STMicroelectronics NV
