Qumcum Lab. の機能はプログラムで実現します。プログラムは搭載している MCUで動作しますが、Qumcum Lab. は複数の MCUで構成しています。
◀ この記事の前に: ソフトウエアの仕様
▶ この記事の次に: 機能構成図
全体の構成
Qumcum Lab. は複数のセンサなどの入力系と、ロボットの頭部と四肢を動かすためのサーボモータ、発声発音用のスピーカなどの出力系、それらを制御するための複数のボード( プリント基板 )で構成しています。
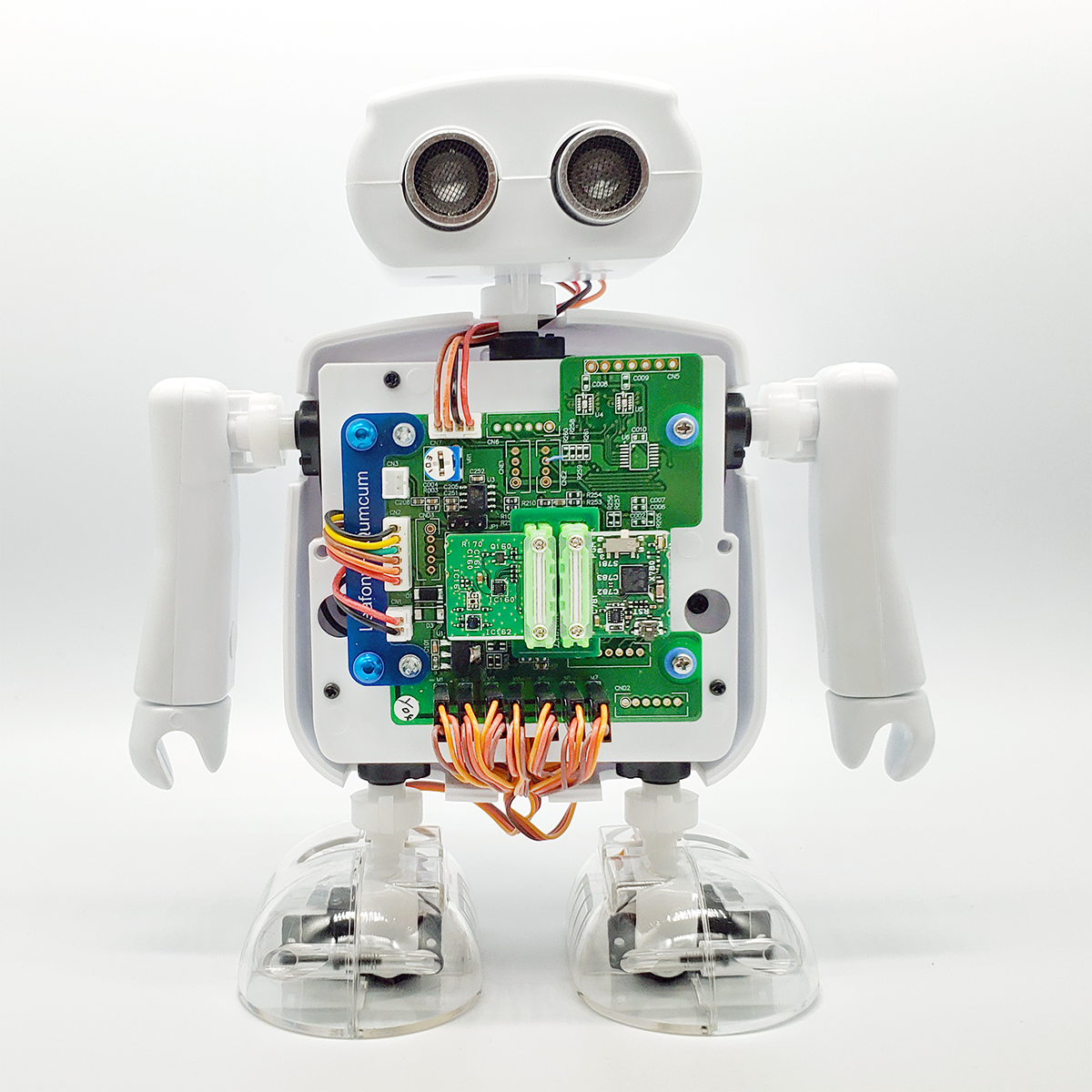
複数のボードのうち胴体の真ん中にある最も大きなボードがメインボードです。メインボードには入力用と出力用の電子回路以外に電源系などの電子回路を搭載しています。
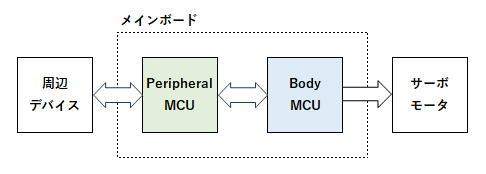
制御の中心となる MCUは標準構成で 2つ搭載します。周辺デバイスとやりとりを行う Peripheral MCUと Qumcum Lab.全体の制御とサーボモータの制御を行う Body MCUです。
- Body MCU:
メインボードに搭載している Leafony Block 内の MCU(STM32)、ロボットのメインMCU - Peripheral MCU:
周辺回路を制御する MCU(ESP32)
標準構成
標準構成は以下のとおりです
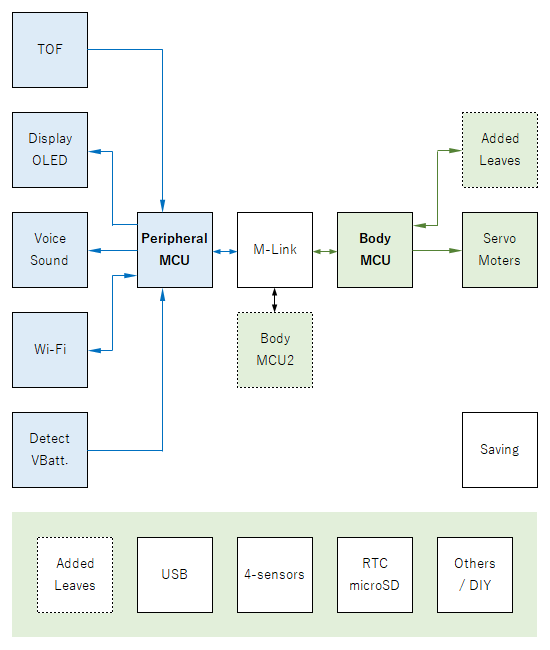
- Display OLED: ロボットの内部状況の表示、ロボットからのメッセージ、デバッグ時など多様に使用する表示装置。有機ELディスプレイ 0.95インチ RGB 96×64ドット
- Voice Sound: Peripheral MCU に内蔵している DACの出力(音声や音)を増幅するアンプとスピーカー
- Servo Motors: ロボットの四肢と頭部を動かすサーボモータ( 計7個 )
- Detect VBatt: 電源電圧を測定する回路、Body MCU の ADC入力
- Saving: 省電力に関係する回路、各MCUと頭部ボードの電力制御と M-Linkの切換え
- Added Leaves: Leafony Blockに リーフを追加して機能拡張を実現、自作したカスタムリーフも可能
プログラミング対象となるMCU
プログラミングの対象となる MCUは標準構成で二つ、メインボード内のオプションでひとつ追加することができます。オプションの頭部ボードを追加することにより、さらの多くの MCUを搭載することができます。
- Body MCU:
Qumcum Lab. の制御の中心となる MCUです。メインボードに搭載している Leafony Block 内の MCU(STM32)です。標準構成では Arduinoでプログラミングしています。 - Peripheral MCU:
周辺回路を制御する MCUです。メインボードの裏面に搭載している ESP32です。標準構成では Arduinoでプログラミングしています。 - Body MCU2:( オプション )
メインボードに追加で Leafony Block を追加することができます。Body MCU とは独立しています。MCUは STM32または AVRを想定しています。 - Head MCU:( オプション )
頭部に頭部ボードを追加することができます。MCUは任意のものを使用できます。メインボードとは MCU間を接続する M-Link 機能で通信を行います。M-Link は SPIのディジーチェインによる独自の MCU間通信です。
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- 複数のMCUをつなぐ: このロボットには複数の MCUが搭載されています。その MCU間の接続の概要です。
他のWebサイト
- SN74LVC1G3157 SPDT アナログスイッチ Datasheet
