Qumcum Lab. に固有なハードウエアの特徴です。
◀ この記事の前に: 身体性に対応したい
▶ この記事の次に: 全体ブロック図
特 徴
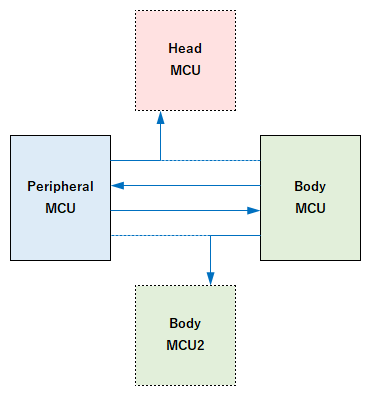
多くの機能を搭載すること、柔軟な回路を構成すること、複数の MCU連携を究めることを目的としているため、Qumcum Lab. は複数の MCUを搭載することができます。標準の構成で Body MCUと Peripheral MCUの二つの MCU、オプションで Head MCUと Body MCU2 の二つのMCUを追加することができ、合計で最大4つの MCUを搭載することができます。
多くの MCUや頭部ボードを搭載することにより消費電力が増大します。Qumcum Lab. は電池駆動なのでできるだけ消費電力を抑える必要もあります。そのための省電力制御を回路の各所で行っています。Lefony は IoT用途のため多彩な省電力のためのしくみを持ちます。Leadony以外の回路も同様に多くの省電力制御に対応できるしくみを持っています。
複数の MCUを機能ごとに使い分けて連携させることと、MCUや周辺回路の省電力制御ができることが Qumcum Lab. の特徴のひとつとなっています。
Leafony
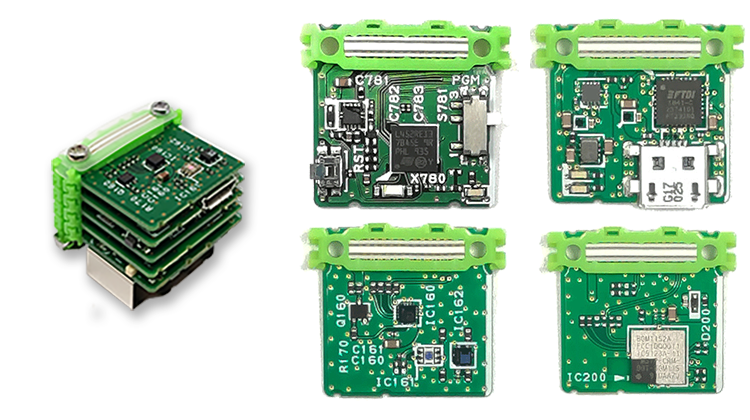
IoT用の小型ボードシステムである “Leafony” を使用しています。
マルチ MCU
複数の MCUを搭載しています。機能局在性を意識しています。
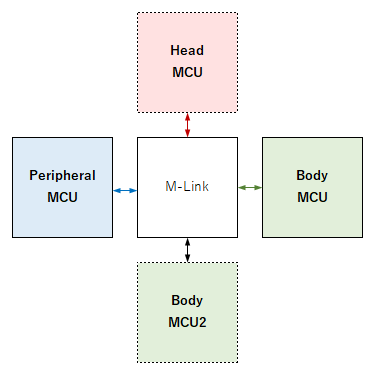
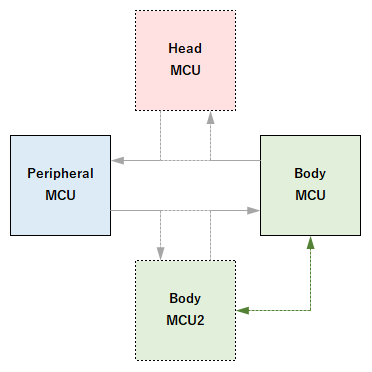
MCU 連携 / M-Link
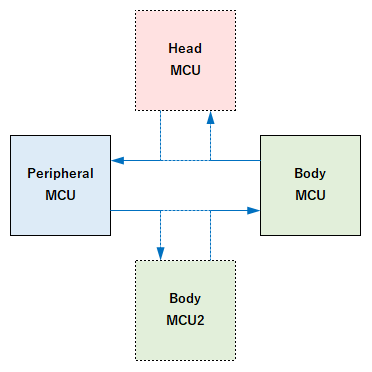
搭載している複数のMCUの組合せを変えて、通信を行う機能です。通信は SPIのディジーチェーンで行います。目的と求める速度によりプログラムにより構成を変更できます。
Leafony 連携 / M-Link2
ふたつある Leafony Block 間の通信を行う機能です。M-Linkと独立して使用できます。通信は I2Cで行います。
省電力制御(MCU)/ Wakeup
MCUの省電力を制御する機能です。スリープからの復帰(ウエイクアップ)を他の MCUから行います。一部の動物が備える半球睡眠を意識しています。
省電力制御(回路) / PowerSaving
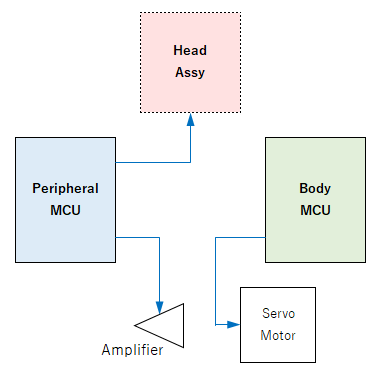
使用しない回路の省電力を制御する機能です。対象は音響出力の DACに接続する増幅回路、表示を行う OLEDデバイス、サーボモータ、オプションの頭部ボードです。
省電力制御(起動遅延) / PowerSaving
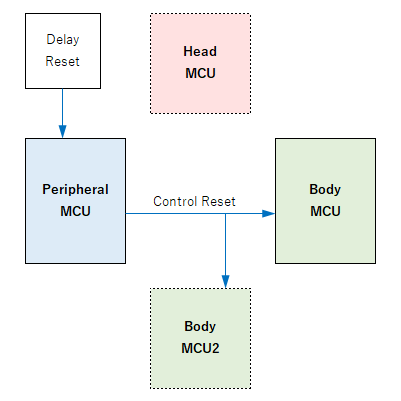
起動時に MCUの起動をずらすことにより必要な電流を分散化するための機能です。
参考情報
参考になる情報は以下のとおりです。
このホームページ内
- 複数のMCUをつなぐ: このロボットには複数の MCUが搭載されています。その MCU間の接続の概要です。
他のWebサイト
- SN74LVC1G3157 SPDT アナログスイッチ Datasheet
